EtherCAT技术在无刷直流电机驱动系统中的应用与软件开发
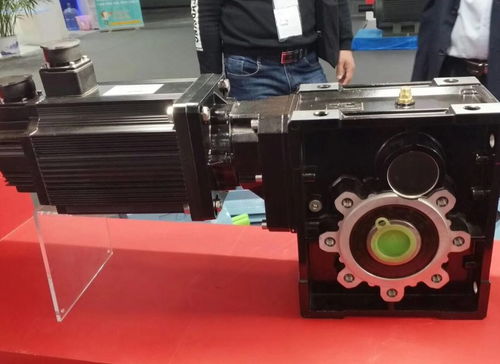
随着工业自动化水平的不断提升,无刷直流电机(BLDC)因其高效率、高功率密度和长寿命等特点,在机器人、数控机床、电动汽车等领域得到广泛应用。而EtherCAT(以太网控制自动化技术)作为一种高性能的工业以太网协议,为无刷直流电机驱动系统提供了实时、精确的控制解决方案。本文将介绍EtherCAT技术在该领域的应用优势,并详细探讨相关的软件开发流程。
EtherCAT技术概述
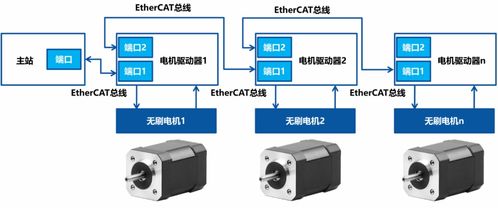
EtherCAT是一种基于以太网的实时通信协议,专为工业自动化设计。它采用主从结构,数据帧在从站设备间依次传输和处理,实现微秒级的同步精度。相比传统现场总线,EtherCAT具有高带宽、低延迟和灵活拓扑等优点,特别适用于多轴运动控制场景,如无刷直流电机驱动系统。
在无刷直流电机驱动系统中的应用优势
- 高实时性:EtherCAT支持分布式时钟机制,确保多个电机轴的同步控制,避免因通信延迟导致的运动误差。在无刷直流电机中,这对实现精确的转速和位置控制至关重要。
- 简化布线:EtherCAT支持线型、树型或星型拓扑,减少了系统布线复杂度,同时通过单一网络集成多个驱动单元,降低了成本。
- 高数据吞吐量:EtherCAT帧可携带多个从站数据,实现高效的数据交换,满足无刷直流电机驱动对电流、位置和状态信息的快速反馈需求。
- 易于集成:EtherCAT与标准以太网兼容,可无缝接入现有工业网络,并支持热插拔功能,方便系统维护和扩展。
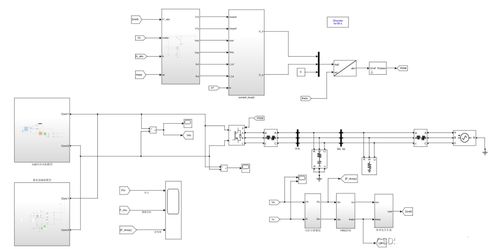
在实际应用中,EtherCAT主站通过发送控制命令(如PWM信号、位置设定值)到从站驱动器,驱动无刷直流电机运行;从站实时反馈电机状态(如电流、温度、故障信息),实现闭环控制。
软件开发流程
EtherCAT在无刷直流电机驱动系统中的软件开发涉及主站配置、从站设备集成和应用程序设计,主要步骤如下:
- 主站配置:
- 使用EtherCAT主站栈(如SOEM、TwinCAT)进行网络初始化,配置分布式时钟(DC)以实现同步。
- 通过ESI(EtherCAT从站信息)文件或EDS(电子数据表)文件识别从站设备,如电机驱动器,并映射过程数据对象(PDO)和服务数据对象(SDO)。
- 从站设备集成:
- 针对无刷直流电机驱动器,开发或配置从站固件,确保支持EtherCAT通信协议。这通常涉及实现CoE(CANopen over EtherCAT)或SoE(Servo Drive over EtherCAT)规范,以处理运动控制命令。
- 设置PDO映射,例如将控制字、目标位置、实际位置等变量映射到通信帧中,实现快速数据交换。
- 应用程序设计:
- 在主站侧开发控制逻辑,使用高级语言(如C/C++、Python或集成环境如TwinCAT)编写代码,实现电机启动、调速、位置控制等功能。
- 集成安全功能,如通过EtherCAT的FSoE(Fail Safe over EtherCAT)协议处理紧急停止和故障恢复。
- 进行测试和调试,利用EtherCAT分析工具(如Wireshark插件)监控网络流量,优化性能。
- 系统优化:
- 调整通信周期和PDO大小,以平衡实时性和带宽需求。例如,在高速应用中,可将周期设置为100μs至1ms。
- 实施诊断机制,实时监测网络状态和电机参数,提升系统可靠性。
案例与前景
以工业机器人关节控制为例,EtherCAT技术可实现多台无刷直流电机的协同运动,通过软件开发精确控制每个电机的扭矩和位置。随着EtherCAT G/G10等新标准的推出,其带宽和实时性将进一步提升,推动无刷直流电机驱动系统在更复杂场景中的应用。
EtherCAT技术通过高效的通信和灵活的软件开发,为无刷直流电机驱动系统提供了强大的支持。开发者需掌握协议细节和工具链,以充分发挥其性能优势,助力工业自动化发展。
如若转载,请注明出处:http://www.yudiping.com/product/22.html
更新时间:2026-06-09 06:19:20